驾驶员行为模型开发技术
团队拥有汽车核心零部件及系统的正向开发能力,基于该技术壁垒可以做到真正独创性的开发来解决智能驾驶(含自动驾驶)量产面临的主要技术难题。
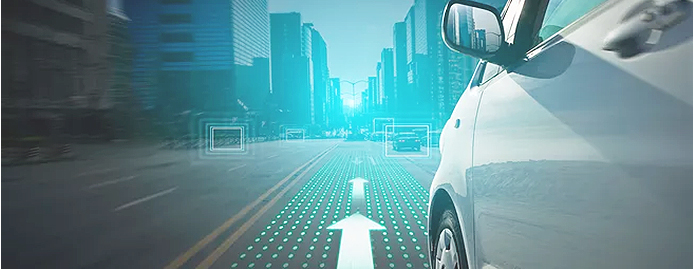
独创的能够让仿真测试真正代替数亿公里道路测试的驾驶员行为模型:自主开发的、基于驾驶员行为的预测和决策模型算法,不仅填补了自动驾驶仿真行业的空白 ,还是唯一能让环境仿真车辆和目标智能驾驶系统进行真实互动和博弈的核心技术(也是仅靠AI不能解决的技术难题),只有有效的仿真测试才能
节约高达数亿的开发经费。
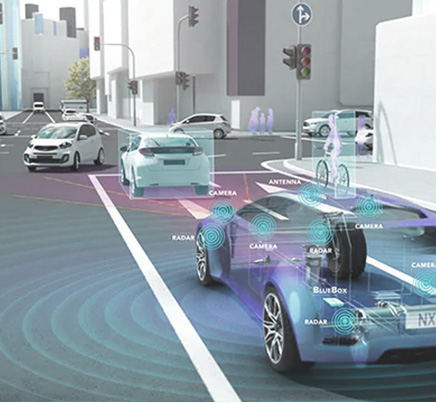
独创的、全面客观且有效的自动驾驶测试和评估体系:其中的系统专家模型算法能够从安全、高效、舒适、经济等维度评估目标智能驾驶系统的每一次决策和控制行为,提供给开发者具体的、可量化的及可实现的改良和优化方案,最后帮助主机厂进行道路验证和释放评估。